NCCR dfab

The RSL leads the developement of research stream 1C "Construction Robotics" in NCCR dfab. The project targets novel technologies to enable robotified, architectural-scale and landscape-scale building processes. We will develop mobile robots which are able to create landscapes and assemble constructions with a precision that is impossible to reach with the available tools and through human operation today.
Autonomous Navigation
In order to accomplish tasks such as landscaping, aggregation of objects, autonomous forestry or earth moving tasks, HEAP needs to be able to navigate autonomously. To this end, we are developing algorithms for global and local navigation in rough terrain. We leverage the fact that our excavator is a walking excavator which gives it the ability to cope with uneven terrain, gaps and large steps.
Contact: Edo Jelavic ()

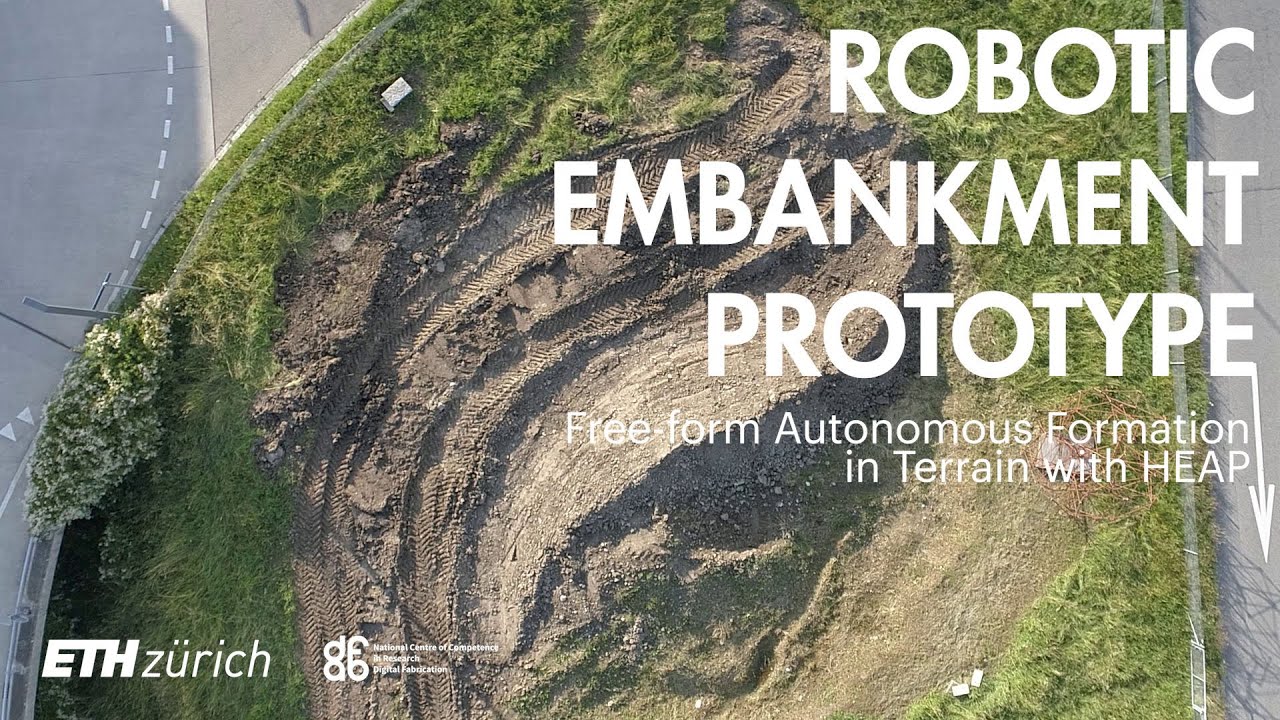
Autonomous Excavation
The autonomously created robotic embankment prototype with HEAP (Hydraulic Excavator for Autonomous Purposes) demonstrates our latest research in on-site and mobile digital fabrication with found materials. The embankment prototype in natural granular material was achieved using state of the art design and construction processes in mapping, modelling, planning and control. The entire process of building the embankment was fully autonomous. An operator was only present in the cabin for safety purposes.
This project was conducted in cooperation with Ilmar Hurkxkens from the Chair of Landscape Architecture.
Contact: Dominic Jud ()
Mobile Robotic Aggregation of Found Objects
In this project, we will develop technologies for object detection, classification and dynamic mobile manipulation/modification to build load-bearing vertical structures, such as walls and columns, on an architectural-scale using found objects. By reusing, repositioning and reshaping
found objects like waste concrete, we can significantly increase sustainability and flexibility of construction and enable building at potentially dangerous or difficult-to-access places. By developing mobile machine technology, we will overcome the constrained workspace limitations of existing stationary approaches.
Contact: Martin Wermelinger ()

Robotic Landscaping
This project provides the technologies and topologies for automated landscaping with unprecedented precision using HEAP. Automated, high-precision landscaping using mobile robotic systems opens huge potential for new architectural designs, can improve sustainability by reducing material transport, enables building and deconstruction in dangerous environments and delivers some prefabrication technologies on-site.
Contact: Dominic Jud ()