KTI - Menzi Muck
From Walking Excavator to Legged Robot
Optimal Contact Force Distribution for Improved Navigation in Challenging Terrain
The goal of this KTI project between the Legged Robotics Group and external page Menzi Muck AG is to transfer the technology for ground reaction force optimization from StarlETH to walking excavators.

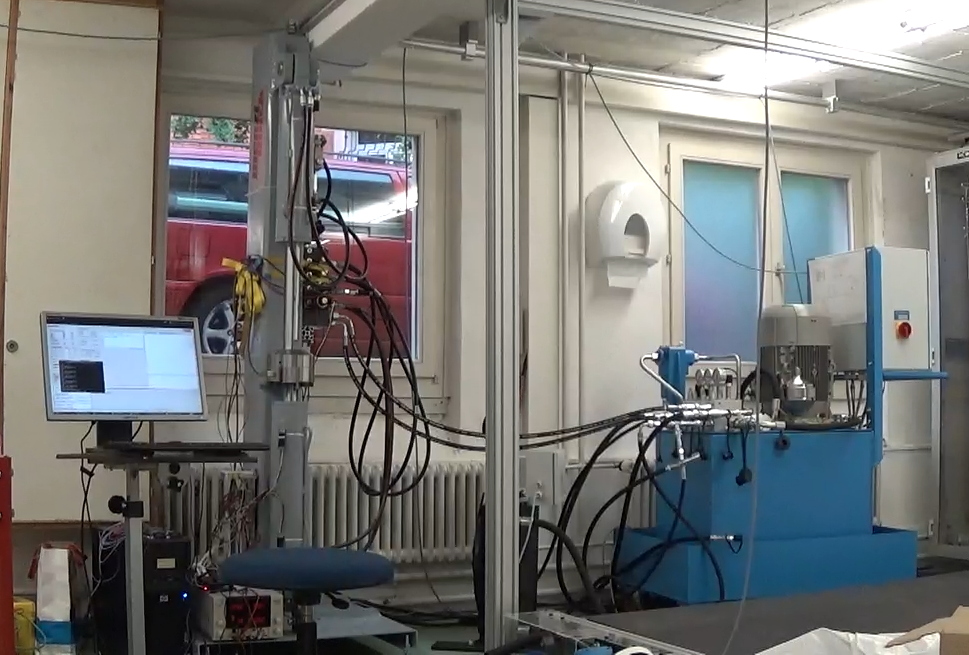
Pressure-based force control
The key element for this technology transfer is accurate force control of the hydraulic cylinders in the legs of the excavators. To this end, a single axis testbench was built to test and tune the corresponding force control algorithms. With our technology, we achieve a force tracking accuracy better than 1%.

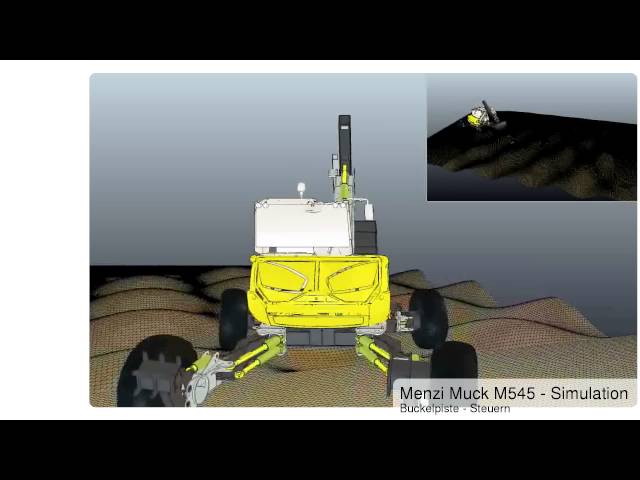
Fully-automated force distribution
With precise force control in the legs of the walking excavator, we can implement the same model based control algorithms as on StarlETH (Virtual Model Control, Whole Body Control).
First experiments with two controlled cylinder
